Welcome to Binary Bots!
Discover my CS &
Robotics projects below.
Robotics and Computer Science (CS) are deeply intertwined fields that complement each other seamlessly. The fusion of these fields enables the creation of intelligent, autonomous systems that can tackle complex real-world challenges.
Robotics leverages CS principles to develop advanced control systems, sensor integration, and decision-making algorithms, while CS benefits from the practical applications and challenges posed by robotics.
Combining robotics with CS enhances automation, enabling efficient, precise operations in various domains, reducing human error, and improving productivity.
Robotics relies on CS techniques, such as computer vision and machine learning, to perceive and interpret the surrounding environment, enabling more sophisticated and adaptable robotic systems.
Integrating robotics with CS equips machines with problem-solving capabilities, enabling them to adapt, learn, and tackle challenges in dynamic environments, enhancing their functionality and application.
My research explores the intersection of Computer Science and Robotics, focusing on autonomous systems, human-robot interaction, and machine learning. I aim to develop intelligent solutions that enhance efficiency, adaptability, and interaction in diverse real-world applications.
I have recently started exploring the field of robotic control systems and algorithms. I have done a handful of projects using control theory, which has given me a solid foundation in areas such as sensor integration, motion planning, and closed-loop control. I am eager to delve deeper into this domain and apply my growing expertise in robotics and automation.
I have experience using the Python OpenCV library for computer vision and image/video processing. I'm particularly interested in the intersection of computer vision and artificial intelligence, exploring techniques like object detection, classification, and tracking using machine learning approaches.
I have a basic understanding of HTML, CSS, and JavaScript, and I have primarily focused on learning JavaScript. I am currently focused on learning Kotlin. I am interested in expanding my mobile app development skills and exploring Android development frameworks and libraries.
Alongwith control systems I have a keen interest in simulation and modeling tools for robotics. I have explored Robot Operating System (ROS1) and Gazebo, utilizing these platforms to simulate robotic systems and test control algorithms. This hands-on experience has been invaluable in advancing my understanding of robotic software development.
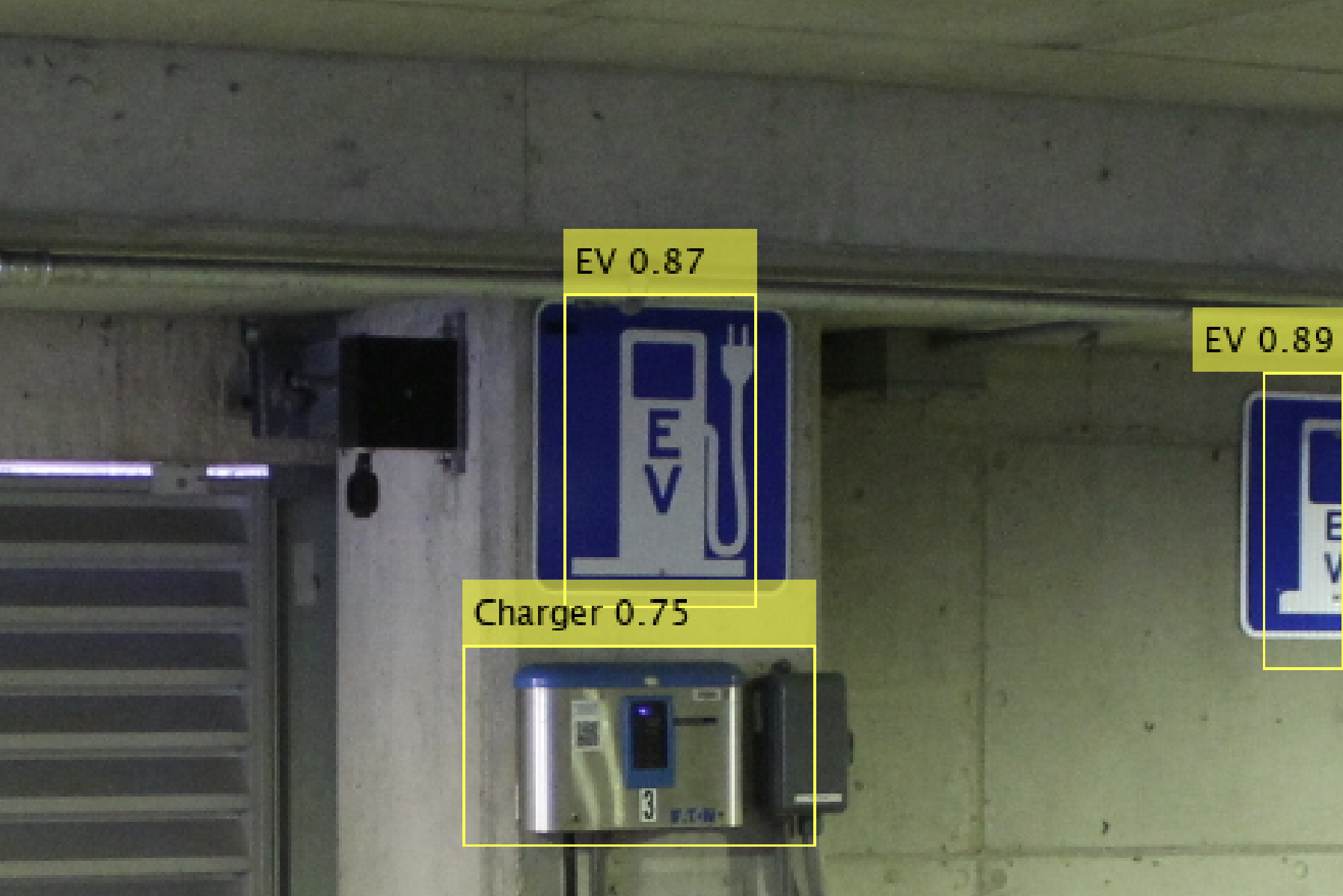
This project uses YOLOv4 deep learning to automatically detect electric vehicle signs, EV charging stations, and accessible parking signs in parking lot images, achieving 74% mAP through transfer learning on a custom dataset.
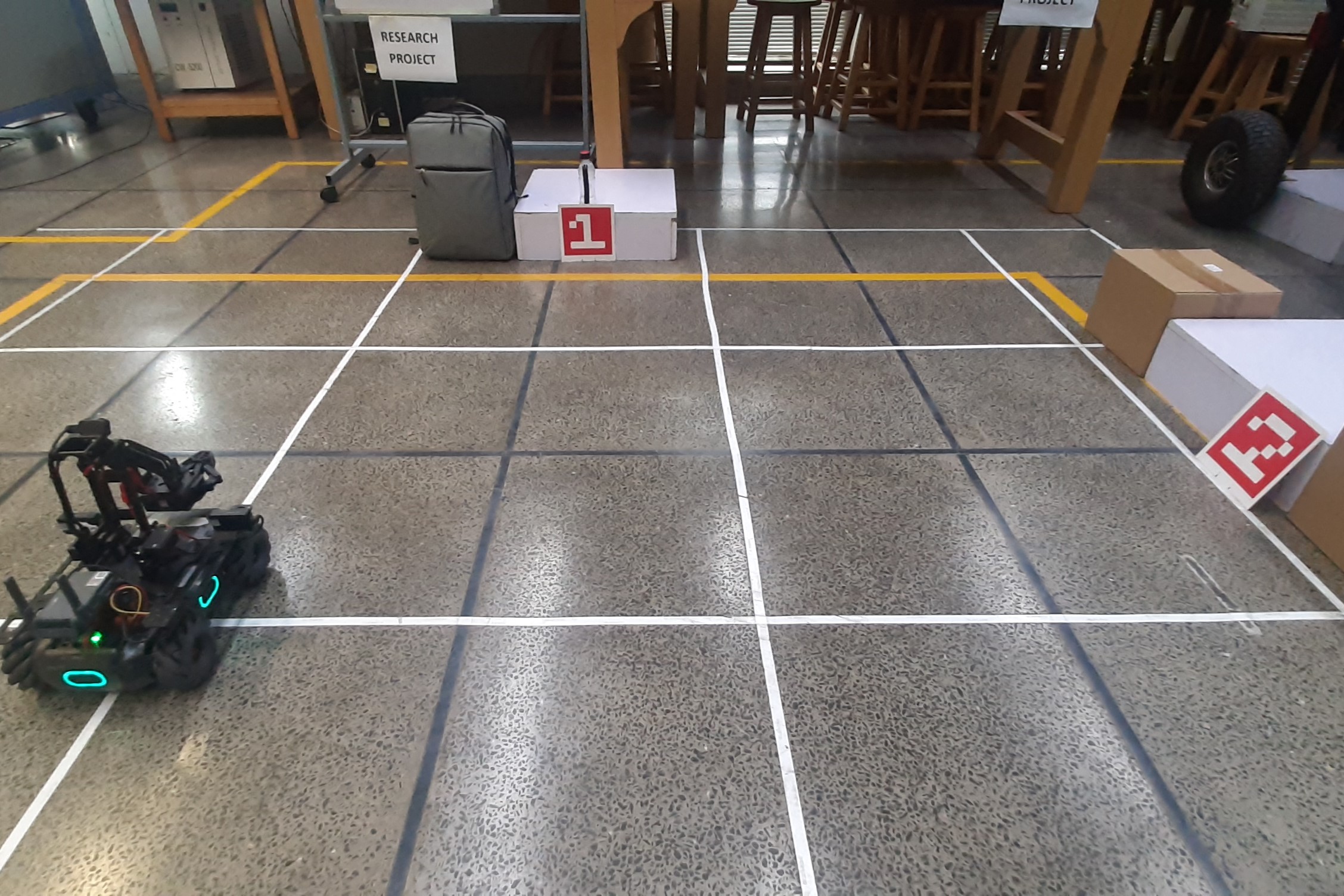
This project uses a Robomaster robot with computer vision and PID control to detect markers, pick up an object, and place it at a target location.
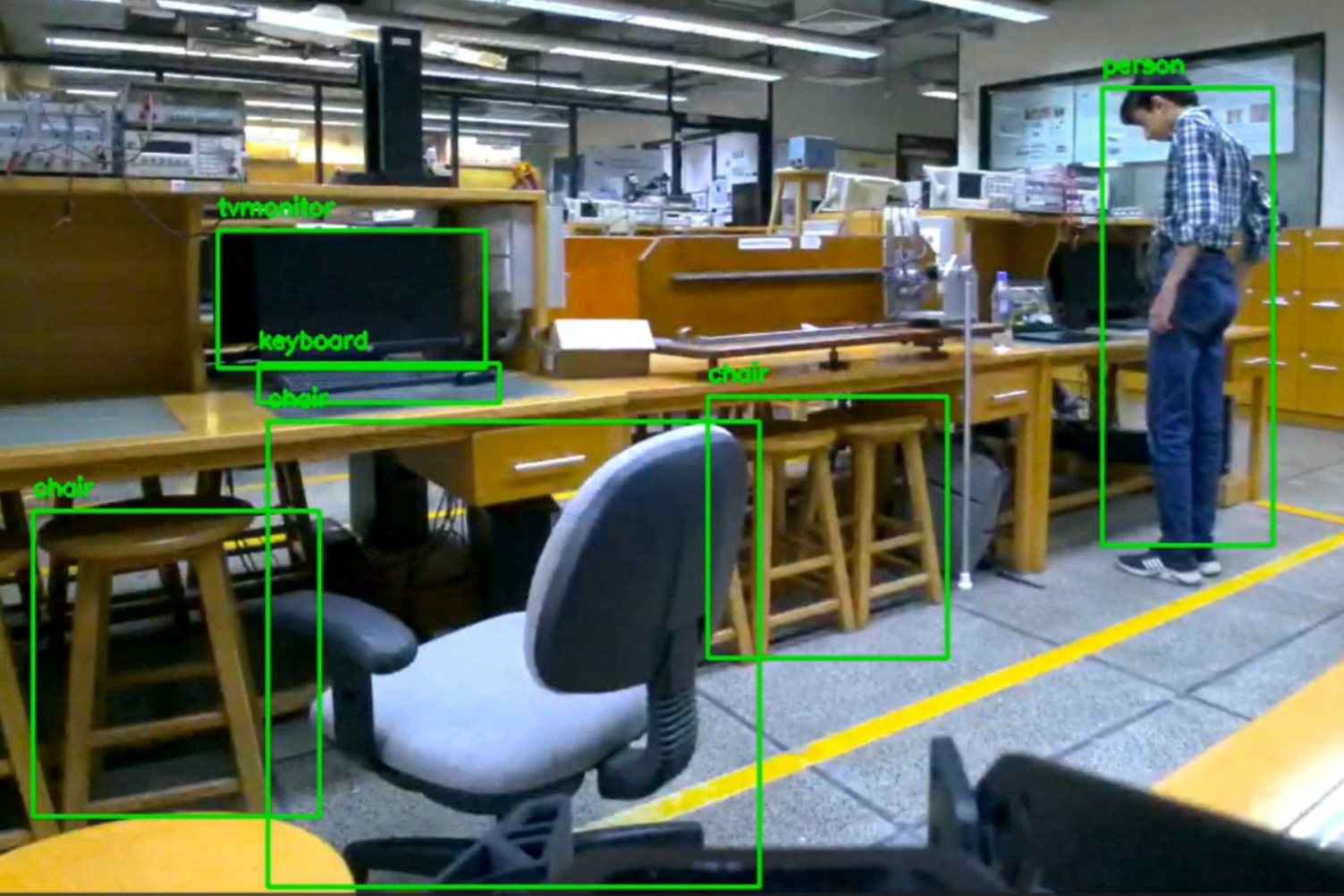
This project uses the YOLOv3 object detection algorithm to identify objects in real-time video streams, displaying bounding boxes and class labels.
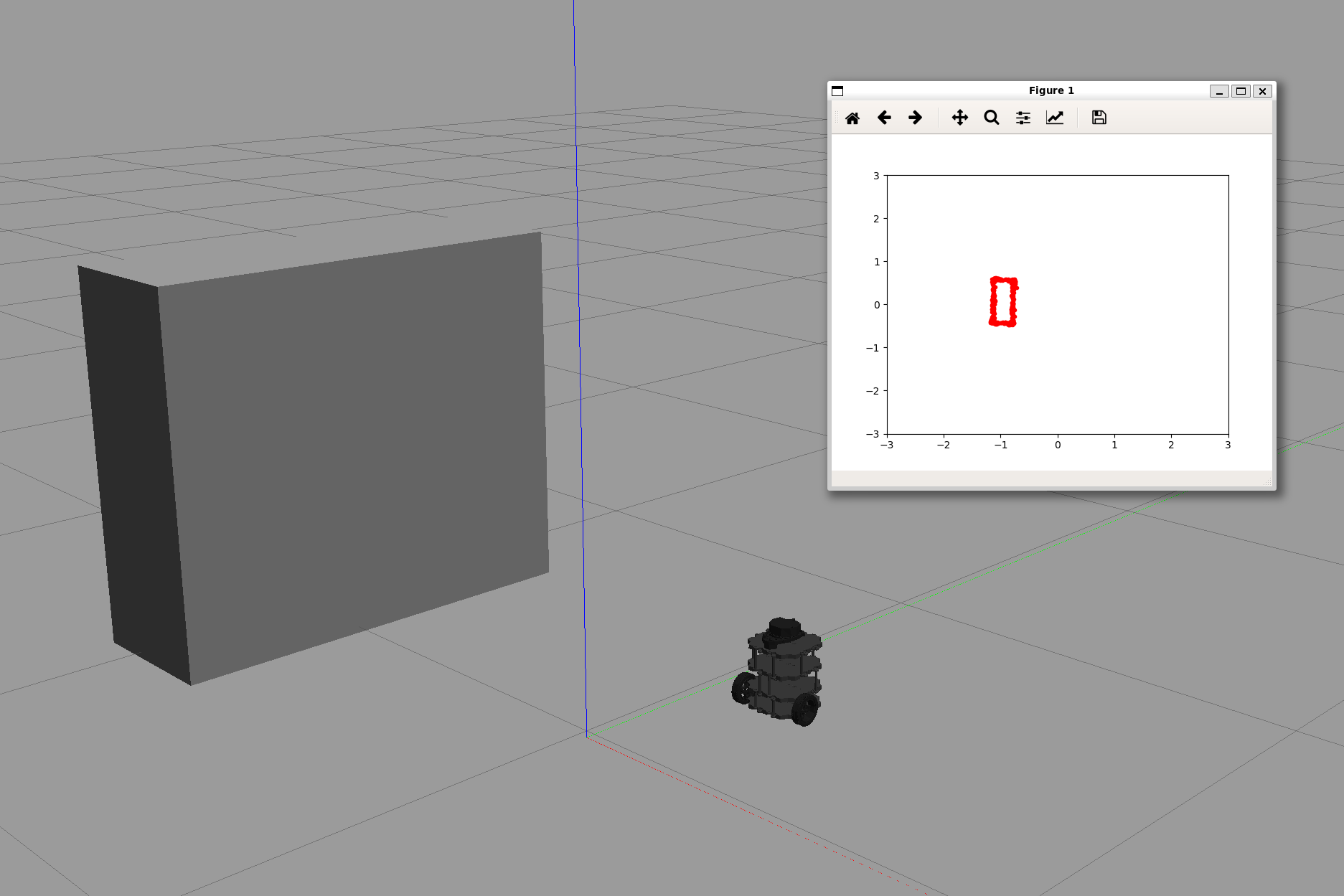
This ROS1 project uses Turtlebot3 robot in Gazebo to detect obstacles, map their positions, and generate a 2D visualization of the environment.
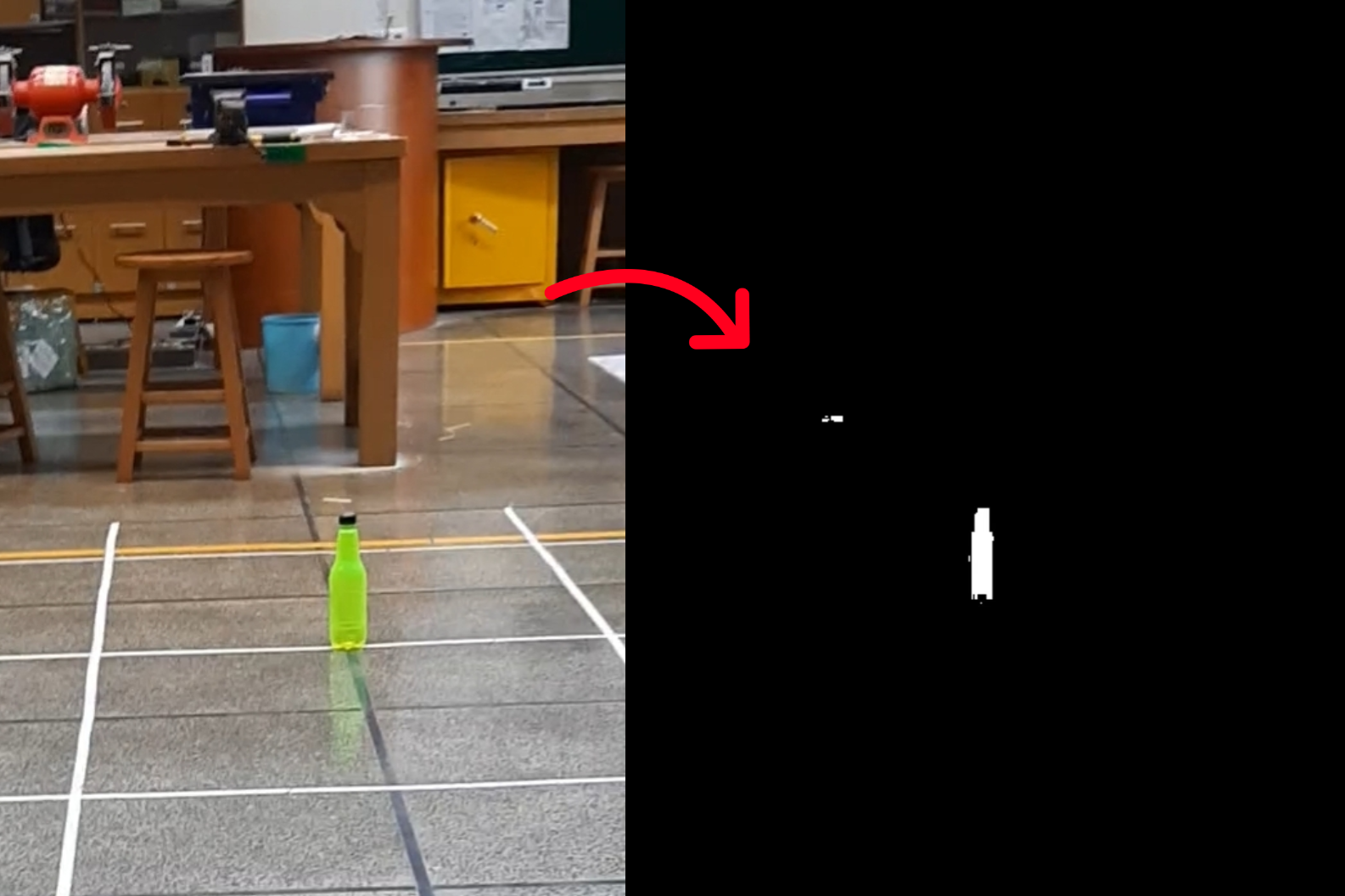
This project uses OpenCV to detect a green bottle, calculate its distance and angle, and then use a Robomaster robot to pick up and return the bottle.

This project uses computer vision techniques like Canny edge detection and Hough transform to enable a robot to follow lines of different colors.
The F1 Pit Stop Strategist is a tool that optimizes pit stop strategies for Formula 1 teams, considering track conditions, car performance, and weather to provide the most effective strategy.
COMING SOON